Położenie ogniw i tory punktów
Na rysunkach podanoo sposób wykreślenia położenia kolejnych postaci grup drugiej klasy. Zadane są położenia zewnętrznych elementów węzłowych grup lub prowadnic jeśli zewnętrzne węzły są przesuwne.
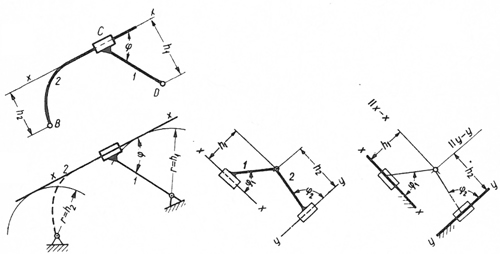
Każdorazowo rysunek podaje postać grupy i jej wymiary, rysunek sposób wykreślenia położenia grupy.
Konstrukcja widoczna jest z rysunku. W niektórych przypadkach konstrukcja daje kilka położeń grupy. Wtedy rzeczywiste jej położenie staje się jasne przy rozpatrzeniu całego mechanizmu i ciągłości jego ruchu.
W przypadku grup klasy trzeciej i wyższych położenie grupy jest także całkowicie określone położeniem zewnętrznych elementów węzłowych (D, E, F) jej łączników. Bezpośrednie wykreślenie położenia grupy nie jest jednakże możliwe.
Grupę dzielimy wtedy na dwa układy (mechanizmy) rozdzielając jeden z jego węzłów wewnętrznych. Wyznaczamy następnie tor punktu B w obu układach poruszających się niezależnie (przy stałych punktach D, E, F). Punkt przecięcia się tych torów określa położenie węzła B, a więc i całego układu. Jeśli punktów przecięcia jest więcej niż jeden rzeczywiste położenie grupy uwarunkowane jest ciągłością ruchu mechanizmu i może być łatwo określone przez rozpatrzenie poprzednich położeń mechanizmu w czasie jego ruchu.
Sposób powyższy może być stosowany także dla grup wyższych rzędów i klas. W każdym przypadku należy grupę rozdzielić na mechanizmy U klasy tak, by wyznaczenie toru środka rozdzielonego węzła w obu układach nie nastręczało trudności. Jeśli grupa zawiera węzły przesuwne, należy korzystać przy tym z podanych wyżej metod dla różnych postaci grup drugiej klasy.
Zamiast wyżej opisanego sposobu, żmudnego szczególnie w przypadku grup bardziej złożonych korzystnie jest stosować metodę szablonową.
W tym celu wykonuje się szablon o kształcie ogniwa zasadniczego ABC i wyznacza jednoczesne położenie punktów A, B, C na ich torach wykreślonych łukami kół z zadanych środków D, E, F zewnętrznych elementów węzłowych łączników grupy.
W celu wyznaczenia torów punktów rozpatrywanego mechanizmu (rys. 164a) dzielimy koło korbowe na dwanaście równych części i wyznaczamy położenia ogniw mechanizmu odpowiadające kolejnym położeniom korby.
Łącząc kolejne położenia rozpatrywanego punktu otrzymujemy tor, jaki przebywa on w czasie ruchu mechanizmu. Na rysunku wykreślono tor węzła E oraz położenie wahacza 4 i suwaka 6 odpowiadające kolejnym położeniom korby 2.